|
[ บทความ : Robot ] ตอนที่ 6 เรื่อง ... การควบคุม ET-ROBOT RD2 (การตรวจสอบการชนของรถหุ่นยนต์ด้วย Switch) |
| การตรวจสอบการชนของรถหุ่นยนต์ด้วย Switch |
|
การศึกษาการทำงานของหุ่นยนต์นั้น
หัวใจสำคัญที่สุดอยู่ที่ขั้นตอนของการเขียนโปรแกรมสำหรับควบคุมการทำงานของหุ่นยนต์ให้สามารถทำงานตามเงื่อนไขที่เรากำหนดไว้ได้
ซึ่งการที่จะสามารถสร้างระบบหุ่นยนต์ให้มีความเฉลียวฉลาดได้มากนอยเพียงใดนั้น
ปัจจัยหลักอย่างหนึ่งก็คือ
การติดตั้งอุปกรณ์ตรวจจับแบบต่างๆให้กับหุ่นยนต์
เพื่อใช้ในการตรวจจับสภาพแวดล้อมภายนอกรอบๆตัวหุ่นยนต์อันจะเป็นหนทางเพื่อนำไปสูการวิเคราะหและตัดสินใจสั่งงานระบบกลไกต่างๆเพื่อตอบสนองต่อเงื่อนไขต่างๆที่ตรวจจับได้
สำหรับระบบโครงสร้างของรถหุ่นยนต์
ET-ROBOT RD2
ก็เช่นเดียวกัน
ในชุดมาตรฐานจะมีการติดตั้งอุปกรณ์สำหรับตรวจจับ
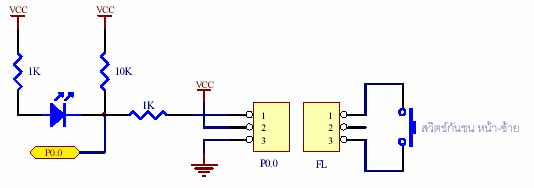
Input แบบต่างๆไว้ 2
ส่วนด้วยกัน คือ Switch สำหรับตรวจสอบการชน
ด้านหน้าและด้านหลัง
และแผงวงจรสำหรับตรวจจับเส้นขนาด
3 จุด
สำหรับใช้นำทางให้รถหุ่นยนต์เคลื่อนที่ไปตามแนวเส้น
ซึ่งในบทนี้เราจะมาทดลองศึกษาเรียนรูเกี่ยวกับวิธีการในการตรวจสอบการชนของรถหุ่นยนต์รุ่น
ET-ROBOT RD2 ด้วย Switch
กันดู
เพื่อเป็นแนวทางในการนำไปประยุกต์ใช้งานต่อไป การทำงานของ
Switch ตรวจสอบการชน
|
|
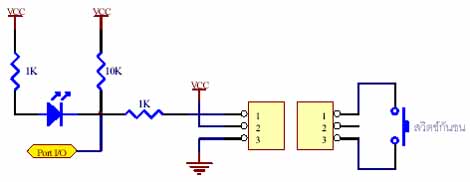
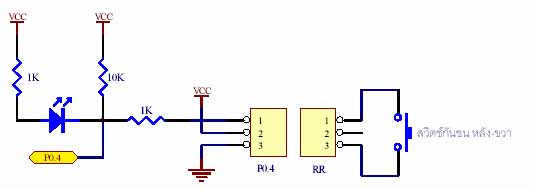
รูปแสดง
วงจรสวิตช์ตรวจสอบการชน
ขนาด 1 จุด ของรถหุ่นยนต์ ET-ROBOT-RD2
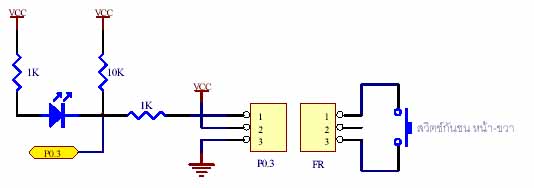
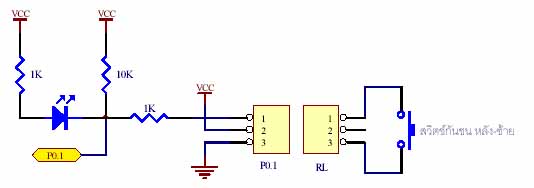
รูปแสดง
วงจรสวิตช์ตรวจสอบการชน
ของรถหุ่นยนต์ รุ่น ET-ROBOT-RD2 |
|
สำหรับการทำงานของวงจรนั้น
จะเห็นได้ว่า ตามปรกติแล้ว
พอร์ต I/O สำหรับใช้ตรวจจับการทำงานของสวิตช์ตรวจสอบการชน
จะถูกต่อวงจร Pull-Up
รอไว้เรียบร้อยแล้ว
ดังนั้นในสภาวะปรกติสถานะของ
Input จะมีค่าเป็น “1”
เสมอ
แต่เมื่อสวิตช์กันชนถูกกด
จะทำให้หน้าสัมผัสของสวิตช์ลัดวงจรเข้าหากัน
ซึ่งจะส่งผลให้เกิดการลัดวงจรจาก
พอร์ต I/O ลง Ground
โดยผ่านตัวต้านทานค่า
1Kohm ซึ่งในกรณีนี้จะทำให้สถานะ
Input ของพอร์ตมีค่าเป็น
“0” ดังนั้นเราจึงสามารถตรวจสอบการทำงานของสวิตช์ได้โดยการตรวจสอบสถานะทางโลจิกของพอร์ต
I/O ที่เชื่อมต่ออยู่กับสวิตช์กันชน
ตำแหน่งต่างๆ
โดยถ้าบิตใดมีค่า เป็น
“0” ก็แสดงว่าสวิตซ์ตำแหน่งนั้นๆถูกกดให้ทำงานหรือเกิดการชนในตำแหน่งนั้นๆแล้ว
การตรวจสอบสวิตช์
สำหรับตรวจสอบการชน
สำหรับการทดสอบการทำงานของไมโครสวิตช์
ที่ใช้ตรวจสอบการชน
ของรถหุ่นยนต์นั้น
สามารถทำได้โดยการกดก้านสวิตช์เพื่อให้สวิตช์ทำงาน
โดยสภาวะปรกติหน้าสัมผัสของสวิตช์จะเปิดอยู่
แต่เมื่อทำการกดก้านสวิตช์หน้าสัมผัสของสวิตช์จะปิดเข้าหากัน
ซึ่งจะทำให้สภาวะทางโลจิกของหน้าสัมผัสสวิตซ์ด้านที่ต่อกับ
Port I/O
อยู่มีค่าเป็น “0”
และ LED แสดงผลจะติดสว่าง
สำหรับการทดสอบการทำงานของไมโครสวิตช์
อย่างง่ายๆ
สามารถทำได้โดยการกดก้านสวิตช์เพื่อให้หน้าสัมผัสสวิตช์ลัดวงจรเข้าหากันแล้วสังเกตผลการทำงานจากหลอดแสดงผล
LED โดยมีวิธีการตรวจสอบดังนี้
|