|
[ บทความ : Robot ] ตอนที่ 2 เรื่อง ... การควบคุม ET-ROBOT RD2 (การควบคุมการเคลื่อนที่ของรถหุ่นยนต์) |
| การควบคุมการเคลื่อนที่ของรถหุ่นยนต์ ET-ROBOT RD2 |
|
|
| หลักการทำงานของ DC SERVO MOTOR |
|
ตามปรกติทั่วๆไปแล้วนั้น
DC SERVO MOTOR นั้น
จะสามารถหมุนไปในทิศทางตามเข็มนาฬิกา
และทวนเข็มนาฬิกาได้เพียงแค่
180 องศา หรือ
ครึ่งวงกลมเท่านั้น
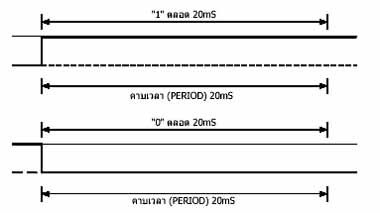
ซึ่งวิธีการสั่งงานให้ SERVO
หมุนไปในตำแหน่งใดๆนั้น
จะอาศัยลักษณะของสัญญาณ Pulse
เป็นตัวบ่งบอก แต่สำหรับ
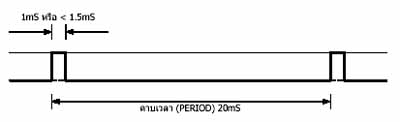
DC SERVO MOTOR ที่เรานำมาใช้ในการขับเคลื่อนล้อเพื่อนำพาตัวรถให้เคลื่อนที่ไปในทิศทางต่างๆได้นั้น
จะต้องทำการดัดแปลงหรือ Modify
ให้สามารถหมุนได้รอบตัวหรือ
360 องศา เสียก่อน
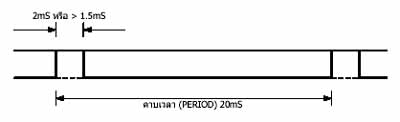
โดย DC
SERVO MOTOR ที่ได้จัดให้ในชุดของ
ET-ROBOT RD2 นั้น
ได้ผ่านการปรับแต่งการทำงาน ของมอเตอร์ให้สามารถหมุนเป็นวงรอบ (360 องศา) ได้เป็นที่เรียบร้อยแล้วโดยวิธีในการควบคุมให้มอเตอร์ ซึ่งทำการดัดแปลงแล้วให้หมุนไปในทิศทางต่างๆนั้น จะมีลักษณะดังนี้
|
|
|
|
|
|
|
|
|
|
ซึ่งจะเห็นได้ว่าในการควบคุมการทำงานของมอเตอร์นั้นจะใช้วิธีการสร้างสัญญาณ Pulse เพื่อส่งไปบังคับตัวมอเตอร์ให้หมุนไปในทิศทางต่างๆตามต้องการ ซึ่งในกรณีของรถหุ่นยนต์ ET-ROBOT RD2 นั้นจะต้องทำการ ..........
|
|